[IOI 2023] 机器人比赛
题目背景
这是一道交互题,你只需要实现代码中要求的函数。
你的代码不需要引用任何额外的头文件,也不需要实现 main 函数。
本题仅支持 C++ 语言提交。
由于某些技术原因,你可能需要在源代码的开头加入以下内容:
#include <vector>
void program_pulibot();
void set_instruction(std::vector<int> S, int Z, char A);
题目描述
塞格德大学的人工智能研究人员正在举办一场机器人编程竞赛。 你的朋友 Hanga 决定参加比赛。由于著名的匈牙利牧羊犬品种 Puli 非常聪明,所以该比赛的目标定为编程实现顶级的 Pulibot。
Pulibot 将在由 网格组成的迷宫中进行测试。 网格的行从北到南编号为 到 ,网格的列从西到东编号为 到 。 我们将位于网格的第 行和第 列的单元格(, )称为单元格 。
考虑一个单元格 (,),和它相邻的有 个单元格。
- 单元格 被称为单元格 的西邻;
- 单元格 被称为单元格 的南邻;
- 单元格 被称为单元格 的东邻;
- 单元格 被称为单元格 的北邻。
如果 或 或 或 成立,则单元格 称为迷宫的边界。每个不是迷宫边界的单元格要么是障碍,要么是空的。 此外,每个空单元格都有一个颜色,由 和 之间的非负整数表示,包括 和 。最初,每个空单元格的颜色为 。
例如,考虑一个迷宫,, , 包含一个障碍单元格 。

唯一的障碍单元格用 表示。迷宫的边界单元格被阴影覆盖。 每个空单元格中的数字表示它的颜色。
从单元格 到单元格 的长度为 ()的路径 是一个空单元格序列 ,序列中的空单元格两两不同。其中对于每个 (),单元格 和 是相邻的。
注意长度为 的路径正好包含 个单元格。
在比赛中,研究人员设置了一个迷宫,其中至少有一条从单元格 到单元格 的路径。注意,这意味着单元格 和 保证为空。
Hanga 不知道迷宫中哪些单元格是空的,哪些单元格是障碍。
你的任务是帮助 Hanga 对 Pulibot 进行编程,使其能够在研究人员设置的未知迷宫中找到从单元格 到单元格 的最短路径(即长度最小的路径)。 Pulibot 的说明和比赛规则如下所述。
注意,在题面的最后一部分描述了一个显示工具,该工具可以用于可视化 Pulibot。
Pulibot 说明
对每个单元格 ( ,),其状态定义为一个整数,具体如下:
- 如果单元格 是边界,则其状态为 ;
- 如果单元格 是障碍,则其状态为 ;
- 如果单元格 是空的,那么它的状态就是单元格的颜色。
Pulibot 的程序是按一系列步骤执行的。在每一步中,Pulibot 都会识别附近单元格的状态,然后执行一条指令。它执行的指令由识别的状态决定。以下是更准确的描述。
假设在当前步骤开始时,Pulibot位于单元格 ,这是一个空单元格。该步骤执行如下:
- 首先,Pulibot 识别当前状态数组,即数组 , 它包含单元格 及其所有相邻单元格的状态:
- 表示单元格 的状态。
- 表示西邻的状态。
- 表示南邻的状态。
- 表示东邻的状态。
- 表示北邻的状态。
- 然后,Pulibot 确定与所识别的状态数组相对应的指令 。
- 最后,Pulibot 执行这条指令:它将单元格 的颜色设置为 ,然后它执行动作 , 是以下动作之一:
- 停留 在单元格 ;
- 移动 到 个邻居之一;
- 终止程序。
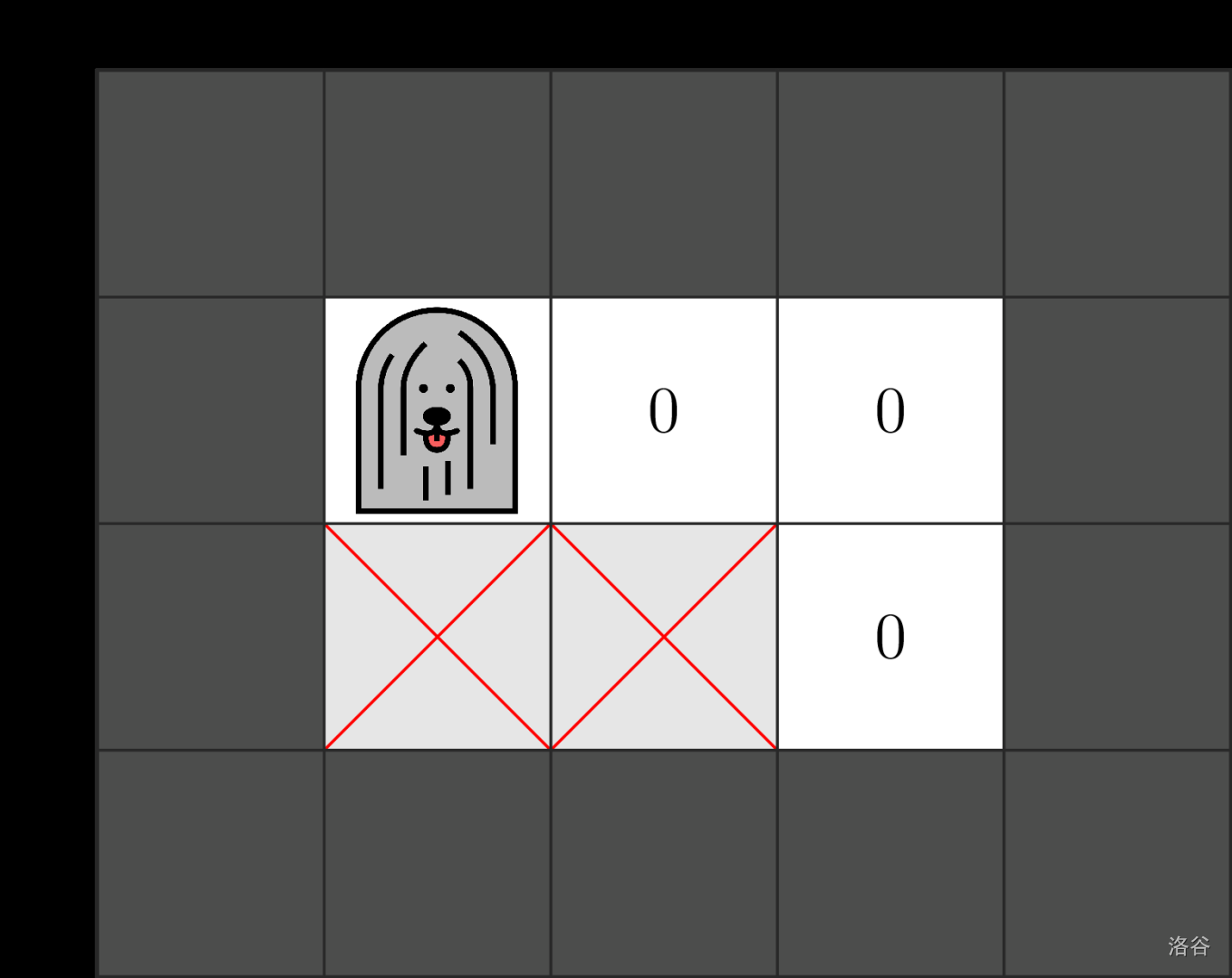
例如,考虑下图左侧显示的场景。Pulibot 当前位于单元格,颜色为。 Pulibot 识别出状态数组 。Pulibot 可能有一个程序,该程序根据所识别的数组,将当前单元格的颜色设置为 ,然后向东移动,如图的中间和右侧所示:

机器人比赛规则
- 在开始时,Pulibot 被放置在单元格 并开始执行其程序。
- 不允许 Pulibot 移动到非空单元格。
- Pulibot 的程序必须在最多 步后终止。
- 在 Pulibot 的程序终止后,迷宫中的空单元格的着色满足以下要求:
- 存在从 到 的最短路径,路径中包括的每个单元格的颜色为 。
- 所有其他空单元格的颜色为 。
- Pulibot 可以在任何空单元格终止其程序。
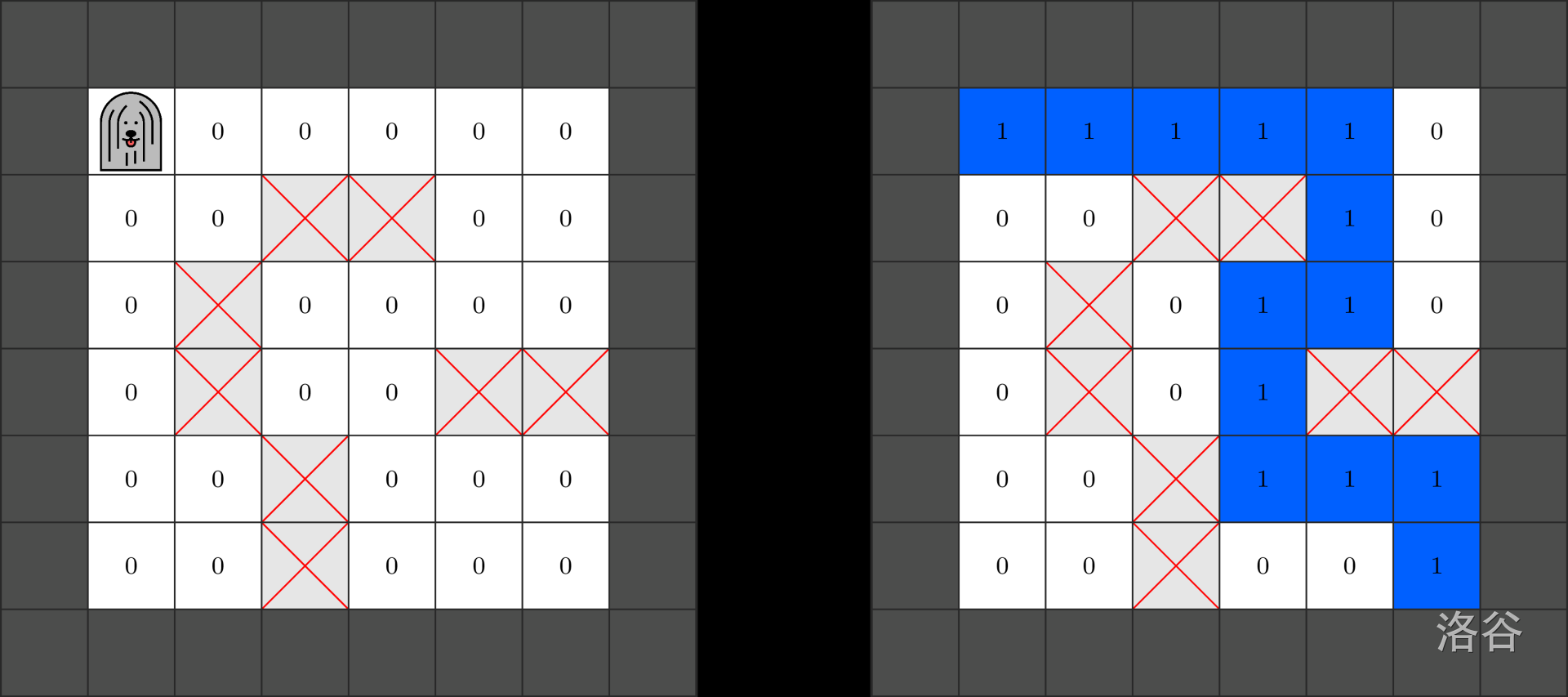
例如,下图显示了一个可能的迷宫,其中。左侧显示了初始配置,右侧显示了程序终止后空单元格的一种可以接受的着色:
输入格式
你要实现以下函数:
void program_pulibot()
- 这个函数应该产生 Pulibot 的程序。对于所有 和 的取值以及满足题目约束条件的任何迷宫,该程序应该都能正确工作。
- 对于每个测试用例,此函数只调用一次。
此函数可以调用以下函数来生成 Pulibot 的程序:
void set_instruction(int[] S, int Z, char A)
- : 长度为 的数组,用来描述状态数组
- : 表示颜色的非负整数
- : 表示 Pulibot 动作的单个字符,具体如下:
H: 停留;W: 移动到西邻;S: 移动到南邻;E: 移动到东邻;N: 移动到北邻;T: 终止程序。
- 调用此函数指示 Pulibot 在识别状态数组 时应执行指令 。
用相同的状态数组 多次调用该函数将导致 Output isn't correct 的判定结果。
不需要对每个可能的状态数组 调用 set_instruction。 但是,如果 Pulibot 后来识别出未设置指令的状态数组,你将得到 Output isn't correct 的判定结果。
program_pulibot 完成后,评测程序会在一个或多个迷宫上调用 Pulibot 的程序。
这些调用不计入解决方案的时间限制。
评测程序不是自适应的,也就是说,每个测试用例的迷宫集合都是预先确定的。
如果 Pulibot 在终止程序之前违反了任何机器人比赛规则,你将得到 Output isn't correct 的判定结果。
输出格式
函数 program_pulibot 可以调用 set_instruction 如下:
| 调用 | 对应状态数组 的指令 |
|---|---|
set_instruction([0, -2, -1, 0, -2], 1, E) |
着色 并且东移 |
set_instruction([0, 1, -1, 0, -2], 1, E) |
|
set_instruction([0, 1, 0, -2, -2], 1, S) |
着色 并且南移 |
set_instruction([0, -1, -2, -2, 1], 1, T) |
着色 并且终止程序 |
考虑一个场景,, ,迷宫如下图所示。
对于这个特定的迷宫,Pulibot 的程序分四个步骤运行。 Pulibot 识别的状态数组和它执行的指令正好依次对应上述对“set_instruction”的四次调用。 这些指令的最后一条指令终止程序。
下图展示了四个步骤每一步之前的迷宫以及终止后的最终颜色。

但是,注意这个由 条指令构成的程序有可能在其他合法的迷宫中找不到最短路径。
所以,如果这个程序被提交,它会收到 Output isn't correct 的判定结果。
提示
约束条件
。因此,Pulibot 可以使用 0 到 19 的颜色,包含 0 和 19。
对于每个用来测试Pulibot的迷宫:
- 至少有一条从单元格 到 的路径。
子任务
- (6 分)迷宫中没有障碍单元格。
- (10 分)
- (18 分)任意两个空单元格之间恰好有一条路径。
- (20 分)从单元格 到 的最短路径的长度为 。
- (46 分)无额外约束条件。
如果在任何测试用例中,对函数 set_instruction 的调用或 Pulibot 程序的执行不符合“实现细节”中所描述的限制条件,则该子任务的解决方案得分将为 。
在每个子任务中,你可以通过生成几乎正确的着色来获得部分分数。
形式化地说:
- 如果空单元格的最终颜色满足机器人竞赛规则,则测试用例的解决方案是完整的。
- 如果最终着色如下所示,则测试用例的解决方案是部分的:
- 存在一条从 到 的最短路径,路径中包含的每个单元格的颜色为 。
- 网格中没有其他颜色为 的空单元格。
- 网格中的某些空单元格的颜色既不是 也不是 。
如果你对某个测试用例的解决方案既不完整也不部分,则该测试用例的得分将为 。
在子任务 1-4 中,对每个测试用例来说,完整解决方案的计分为该子任务分数的 100%,部分解决方案的计分为该子任务分数的 50%。
在子任务 5 中,你的分数取决于 Pulibot 程序中所使用颜色的数量。
更准确地说,用 表示对 set_instruction 进行的所有调用中 的最大值。
测试用例上的得分按下表计算:
| 条件 | 分数 (完整) | 分数 (部分) |
|---|---|---|
每个子任务的得分是该子任务中所有测试用例上计分的最小值。
评测程序示例
评测程序示例按照以下格式读取输入:
- 第 行:
- 第 行 ():
其中, 是一个 行 列的二维整数数组,描述迷宫中非边界单元格。 如果单元格 是空的,;如果单元格 是障碍, 。
评测程序示例首先调用 program_pulibot()。如果评测程序示例检测到违反规则的行为,则会打印 Protocol Violation: <MSG> 并终止,其中 <MSG> 是以下错误消息之一:
Invalid array: 对某些 不成立或者 的长度不是 。Invalid color: 不成立。Invalid action:字符 不是H,W,S,E,N或T。Same state array:用相同的 调用set_instruction两次或以上。
否则,当 program_pulibot 完成时,评测程序示例将在输入所描述的迷宫中执行 Pulibot 的程序。
评测程序示例产生两个输出。首先,评测程序示例将 Pulibot 动作记录写入工作目录中的文件 robot.bin 。
该文件用作下一节中描述的可视化工具的输入。
其次,如果 Pulibot 的程序未成功终止,评测程序示例将打印以下错误消息之一:
Unexpected state:Pulibot 识别出一个无法调用“set_instruction”的状态数组。Invalid move:执行一个动作,导致 Pulibot 移动到一个非空单元格。Too many steps:Pulibot 执行了 步没有终止程序。
否则,令 为 Pulibot 程序终止后单元格 的状态。 评测程序示例按以下格式打印 行:
- 第 行 ():
显示工具
此任务的附件包含有一个名为 display.py 的文件。
调用时,此 Python 脚本会显示 Pulibot 在由评测程序示例的输入所描述的迷宫中的操作。
为此,工作目录中要有二进制文件 robot.bin。
要调用该脚本,请执行以下命令。
python3 display.py
一个简单的图形界面将会出现,主要特性如下:
- 你可以观察整个迷宫的状态。 Pulibot 的当前位置以矩形突出显示。
- 你可以通过单击箭头按钮或按热键来浏览 Pulibot 的步骤。 你还可以跳转到特定步骤。
- Pulibot 程序中即将进行的步骤显示在底部。
它显示当前状态数组及将要执行的指令。
在最后一步之后,它或者会显示评测程序的错误消息之一,或者在程序成功终止时显示
Terminated。 - 对于代表颜色的每个数字,你可以指定视觉背景颜色以及显示的文本。 显示的文本是一个短字符串,应出现在每个具有那个颜色的单元格。你可以通过以下任一方式指定背景颜色和显示的文本:
- 单击
Colors按钮后在对话框窗口中设置它们。 - 编辑
colors.txt文件的内容。
- 单击
- 要重新加载
robot.bin,请使用Reload按钮。 这可以用来处理robot.bin的内容发生更改的情况。